
Experience a Future Where Efficiency and Productivity Thrive
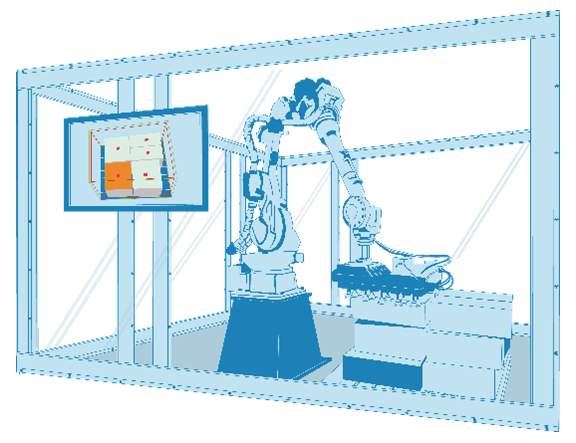
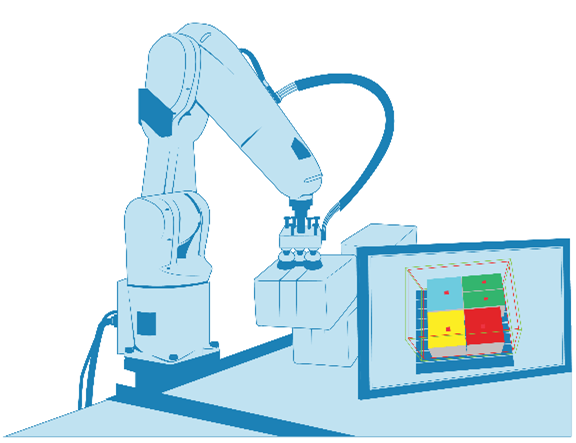
Plus One Robotics’ solutions employ AI vision perception software that provides robots with the hand-eye coordination needed for fulfillment in parcel induction and depalletizing operations. With our innovative approach to human-robot collaboration, we address the challenges of parcel variability and work force shortages head-on.
Why Automate?





Are you challenged with growing demand, labor shortages, or operational inefficiencies?
Reach out to our team of experts today and discover how our solutions can meet the specific challenges of automating your warehouse.
Or talk to a human at (210) 664-3200.